
Regolatore del filtro dell'aria Serie EPV2 ProportionValv pneumatica elettronica

Dettagli
Pressione di alimentazione min: pressione impostata +0,1MPa
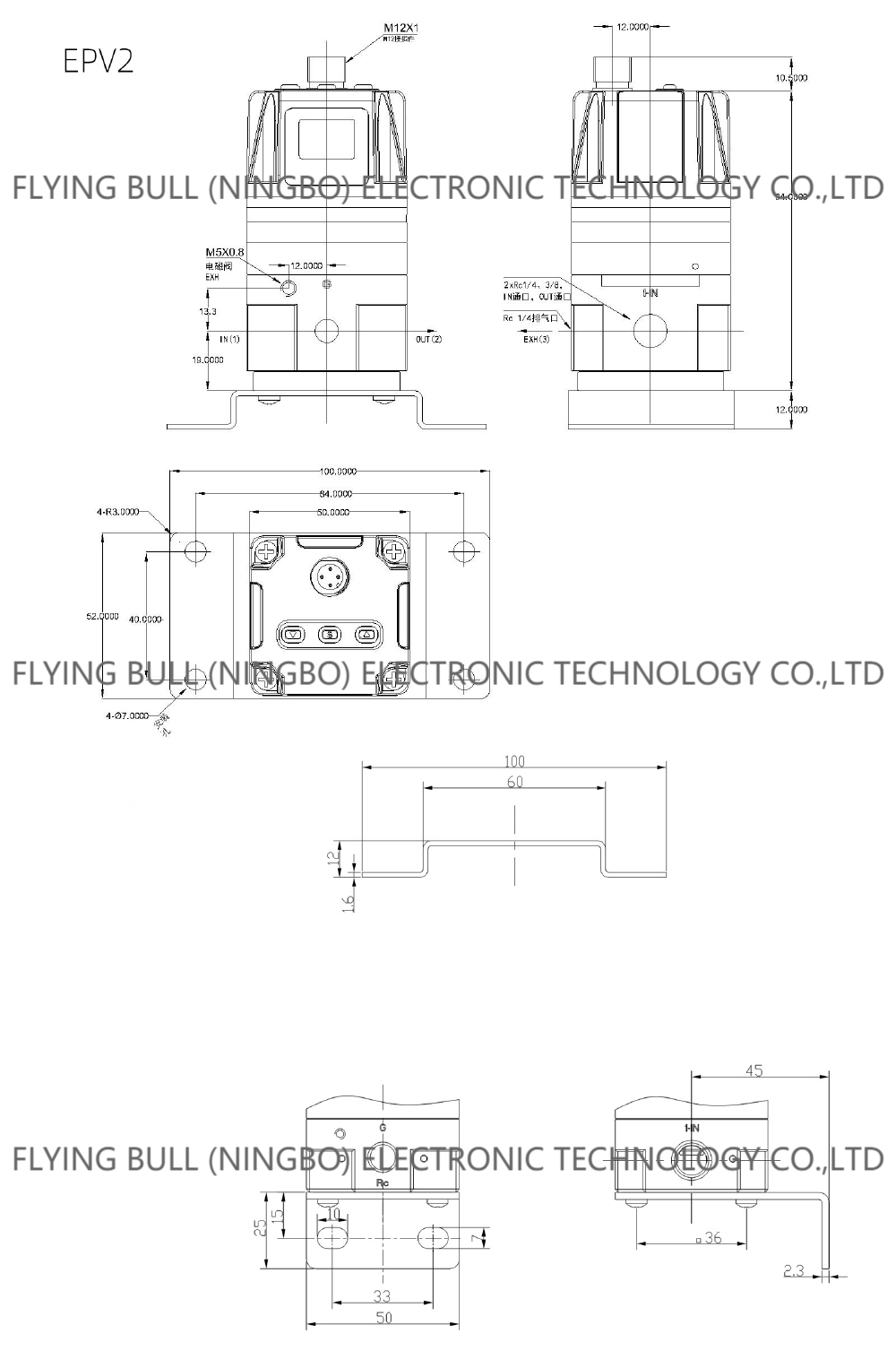
Numero modello: EPV2-1 EPV2-3 EPV2-5
Imposta intervallo di pressione: 0,005 ~ 0,5 MPA
Tipo di corrente del segnale di ingresso: DC4 ~ 20Ma, DC0 ~ 20Ma
Tipo di tensione del segnale di ingresso: DC0-5V, DC0-10V
Switch segnale di uscita uscita: NPN, PNP
DC: 24V 10%
DC: 24 V meno di 1,2a
Tipo di corrente di impedenza di ingresso: 250Ω in meno di
Tipo di tensione di resistenza di ingresso: circa 6,5kΩ
Input preimpostata: DC24VType: circa.7k
Uscita analogica: "DC1-5V (impedenza di carico: 1kωmore Than)
DC4-20MA (impedenza di carico: 250kΩ senza
Precisione di output entro il 6%(FS) "
Lineare: 1%fs
Sloggish: 0,5%fs
Ripetibilità: 0,5%fs
Caratteristica della temperatura: 2%fs
Accuratezza del display a pressione: 2%FS
Graduazione del display a pressione: 1000 gradati
Temperatura ambiente: 0-50 ℃
I voti di protezione: IP65
Capacità di fornitura
Vendi unità: singolo articolo
Dimensione del pacchetto singolo: 7x4x5 cm
Peso lordo singolo: 0,300 kg
Introduzione al prodotto
La valvola proporzionale elettrica è realizzare il controllo di limitazione del flusso mediante controllo elettronico. Il dispositivo di regolazione della pressione di controllo elettrico è costituito da una valvola a solenoide dell'interruttore di regolazione dell'aria e di scarico, un sensore di rilevamento della pressione e un circuito di controllo. Quando c'è un segnale di ingresso, viene aperta la valvola del solenoide di aspirazione, la valvola del solenoide di scarico viene chiusa, la valvola principale fornisce aria alla camera pilota e il nucleo della valvola principale si sposta verso la pressione secondaria di uscita.
Editing di principi strutturali
Quando il segnale di ingresso viene aumentato, la valvola pilota 1 della valvola del solenoide per l'alimentazione dell'aria viene invertita e la valvola pilota del solenoide per lo scarico dell'aria è nello stato di reset, quindi la pressione di alimentazione dell'aria entra nella camera del pilota 5 dalla porta Sup attraverso la valvola di cottura 4 e la pressione di corsi viene aperto e il nucleo della valvola di scarico 3 è chiuso, con conseguente pressione di uscita. Questa pressione di uscita viene restituita al circuito di controllo 8 attraverso il sensore di pressione 6. Qui, la pressione di uscita viene rapidamente confrontata con il valore target fino a quando non è proporzionale al segnale di ingresso, in modo che la pressione di uscita varia in proporzione al segnale di ingresso. Poiché non esiste un meccanismo del deflettore degli ugelli, la valvola è insensibile alle impurità e ha un'alta affidabilità. Editing principio strutturale
Quando il segnale di ingresso viene aumentato, la valvola pilota 1 della valvola del solenoide per l'alimentazione dell'aria viene invertita e la valvola pilota del solenoide per lo scarico dell'aria è nello stato di reset, quindi la pressione di alimentazione dell'aria entra nella camera del pilota 5 dalla porta Sup attraverso la valvola di cottura 4 e la pressione di corsi viene aperto e il nucleo della valvola di scarico 3 è chiuso, con conseguente pressione di uscita. Questa pressione di uscita viene restituita al circuito di controllo 8 attraverso il sensore di pressione 6. Qui, la pressione di uscita viene rapidamente confrontata con il valore target fino a quando non è proporzionale al segnale di ingresso, in modo che la pressione di uscita varia in proporzione al segnale di ingresso. Poiché non esiste un meccanismo del deflettore degli ugelli, la valvola è insensibile alle impurità e ha un'alta affidabilità.
Immagine del prodotto
Dettagli dell'azienda







Vantaggio dell'azienda
Trasporto

FAQ






